第7回『建築構造用高性能590MPa(N/mm²)鋼材(SA440)について』
北海道地区
KOBELCO WELDING VIRTUAL EXPERIENCE
溶接メタバース
学生フォーミュラ日本大会2024に出展
 当サイトにつきましては、
当サイトにつきましては、シリーズと改良ロボット手首の紹介
1. シリーズの紹介
当社ではこれまで中厚板溶接市場をターゲットとした溶接ロボットの開発を進めてきた。その溶接ロボット現ラインナップは、A30、A40、A60、A80である。図1に現シリーズのラインナップのモデル図を示し、図2、表1に各ロボットの動作範囲、可搬質量を示す。

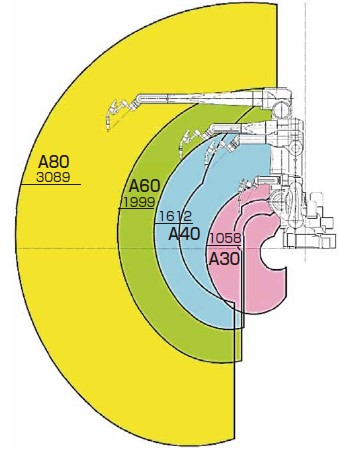
表1 シリーズ 可搬質量/リーチ

A30:第5軸中心から先端まで400mmのトーチ(角度45°)にて、鉛直下向溶接時
A40、A60、A80:第5軸中心から先端まで500mmのトーチ(角度45°)にて、鉛直下向溶接時
1.1. A30
A30は当社ラインナップの中で最も小型の溶接ロボットになる。狭あいな溶接部材での適用を図るため、大きさと重量の小型化を実現した。(高さ約0.8m、重量38kg)
こちらのA30は、主に造船小組立の溶接システムに適用されている。
1.2. A40
A40はロボット根元の第1軸を中空形状とし、トーチケーブルを内蔵することを可能としている溶接ロボットである。このためロボットを逆さ状態で動作させるような、天吊システムへの最適化を実現している。さらに、上腕部にあたる第3軸を+70°から-180°方向まで折曲げることができるので、適用範囲をさらに拡大することを可能としている。A40は建設機械・橋梁などの溶接システムで適用いただいている。
1.3. A60
A60はA40と同様に第1軸を中空形状とした上で、アーム長さを拡張したロボットである。トーチケーブルを第1軸に通すことでケーブルをアームに添わせることが可能となり、ケーブルの巻付きを防ぎさらなる適用率の向上を実現した。アームも長くなることで動作範囲および適用ワークサイズ上限が拡張されている。
このA60は当社溶接ロボットのスタンダード機であり、建設機械、橋梁、鉄骨など幅広い分野で適用いただいている。A40との使い分けとしては、ワークサイズやシステム可動範囲などを考慮した上で選択いただくことになる。
1.4. A80
当社ラインナップの中で最も大型の溶接ロボットである。ロングリーチを生かし、大型ワークに対して移動装置不要で溶接システムへの適用も可能になる。A80は主に建設機械溶接システムでご使用いただいている。
1.5. シリーズの特長
シリーズのA40、A60、A80は共通して第1軸が中空形状になっている。これによる利点は、溶接ケーブル、水・ガスホース、制御ケーブル類を第1軸内に通せることである。従来の溶接ロボットでは、ケーブル類は外から配線する形であるため、ロボットが動作することで振られてしまい、ケーブルが傷むリスクがあった。しかし、本シリーズのように第1軸内にケーブルを通す構造にすることで、ケーブルをアームに沿わせる配置が可能となり、前述の振れ、巻付きに伴う損傷のリスクを軽減することができる。(図3)

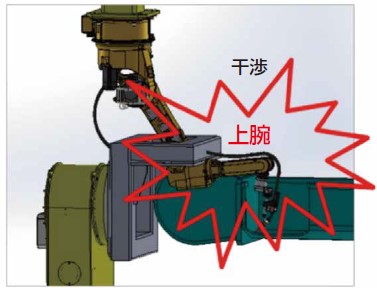
もう一つ特長として、逆エルボ姿勢が可能となっている点がある。逆エルボ姿勢とは、前述のA40でも触れている、第3軸を-180°方向まで幅広く屈曲できる姿勢である。この姿勢は、A40、A60、A80で可能となっている。この姿勢が取れることで、例えば天吊システムでご使用いただく場合にワークとロボットの干渉を避ける姿勢での溶接が可能となる。(図4、図5) 干渉を避けることに加えて、姿勢替えの時間短縮にも貢献できる。天吊り仕様はA40、A60で可能で、A80では床置き仕様のみとなるが、床置きでも逆エルボ姿勢を活用することで、例えば下から潜り込むような姿勢が取れる。これによりワークとの干渉回避を実現しながら、より幅広い溶接システムへの適用が可能となる。

これらの特長を組み合わせることで、さまざまな溶接システムでの適用率向上を図ることができる。例として、天吊システムの A40、A60においては、逆エルボ姿勢を生かしてワークとの干渉を回避しながら、第1軸にケーブルを通すことによりケーブルの振れおよびアームへの巻付きを防ぎ、溶接ロボットの機能を最大限に発揮することができる。(図6)
このように、シリーズでは溶接システムへの適用率向上のため、動作範囲拡大やケーブル処理の改良などを実現してきた。

2. 国内鉄骨システム向け A60の手首改良
2.1. スリム手首概要
国内鉄骨システム向けの A60に関しては、手首部を小型化する改良を行う。(図7) 小型化した手首を、スリム手首と呼称するが、効果としては溶接システムへの適用範囲のさらなる拡大、利便性の拡大を狙ったものになる。

2.2. 手首形状の最適化
溶接ロボットは、先端に溶接トーチを搭載して動作するが、溶接トーチにはトーチケーブルが接続されるため、動作中ケーブルが手首周りに引っかかりケーブルが擦れて傷む、引っ張られることがあるというリスクがある。今回、手首スリム化の改良にあたり手首外観形状を改めることで、ケーブルが引っかかりにくい形状を目指した。
2.2.1 手首幅および回転径の縮小
改良した手首の全長自体は現行手首と変わらないが、図8に示すように幅方向に関しては現行より10mm縮小している。さらに、ロボットS4軸を回転させた際の回転径も同じく、10mm縮小されている。それぞれ10mmとわずかな変化に思われるかもしれないが、このサイズ縮小によりワーク狭あい部への適用範囲をさらに広げることが可能になる。また干渉を避けるための姿勢替え、段取り替え工程を短縮または削減できることにも期待できる。

2.2.2 手首カバー外観の変更
シリーズ以前のロボット手首では、カバーのエッジ部でケーブルが引っかかるというご指摘があった。今回のスリム手首では、カバーの形状を見直し、従来よりも丸みを強くした。(図9)これにより、ケーブルの引っかかりやそれに伴う作業停止のリスクが低減され、さらにはケーブル交換頻度の低減にも貢献できる。

2.2.3 手首前方凹部の改良
これまで開発してきた溶接ロボットで、トーチケーブルが手首前方の第5軸の凹部で留まり、引っかかるリスクがあり、シリーズではその改良を行ってきた。今回のスリム手首ではさらに改良し、第5軸凹部の平坦化を実現した。(図10)これにより、トーチケーブルが第5軸部で留まりにくくなり、ケーブルの引っかかり、突っ張りを予防することができる。

3. おわりに
当社では、中厚板溶接ロボットの開発を継続しており、お客様のシステムへのロボット溶接適用率向上を目指してきた。シリーズ開発の中では、S1軸の中空化や可動範囲拡大に伴う逆エルボ姿勢を実現してきた。今回の手首スリム化の改良によって、溶接システムへのさらなる適用率を向上させ、それを通じてお客様の生産効率向上にも貢献していく。