 当サイトにつきましては、
当サイトにつきましては、偏荷重(へんかじゅう)
溶接ロボットシステムにおいて溶接対象(=ワーク)を溶接に適した姿勢に変えられるポジショナは重要な要素の一つです。
図1に示すポジショナは、ポジショナの一種である片持ち2軸ポジショナです。このポジショナは、片持ち支持部にワークを傾ける傾斜軸と、片持ち先端にワークを回転させる回転軸の回転自由度2軸を持ちます。
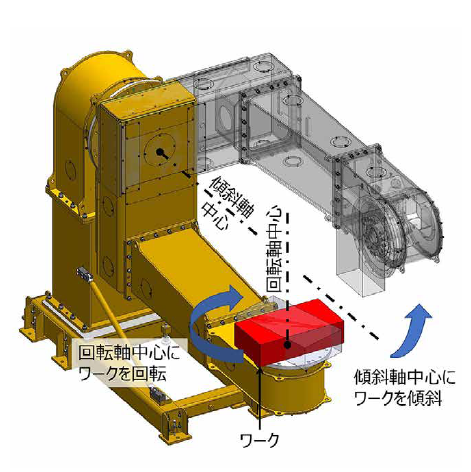
今回は、こうした回転自由度を持つポジショナのスペックに登場する「最大偏荷重」という用語についてご説明します。
回転自由度を持つポジショナのスペックで謳う偏荷重とは、ワークやワークを把持するためのクランプ治具の重心がポジショナの傾斜軸や回転軸の中心から偏った状態にあるとき、このときに発生する傾斜軸や回転軸周りの力のモーメント(=トルク)のことを指します。従って、単位は[N・m]です。
例えば、クランプ治具とワークが一体となった時の重心によって生じる偏荷重が、傾斜軸駆動部の発生するトルクを超えると、ポジショナがワークを傾斜させることができないといったことや、傾斜軸の落下といった重大事象に繋がります。
こういったことが起こらないよう、回転自由度を持つポジショナのスペックには許容値として最大偏荷重を明記しています。
では、偏荷重の計算を片持ち2軸ポジショナが90°傾斜したときを例に具体的にみていきましょう。
偏荷重計算に用いる必要諸量は、図2に示す「ワークとクランプ治具の合成荷重:W」と「傾斜軸中心からワークとクランプ治具の合成重心までの距離:L」です。
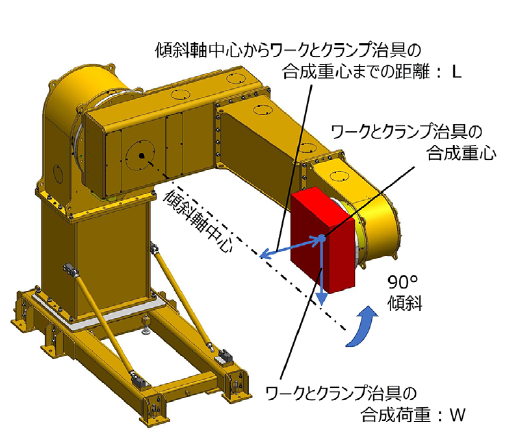
このとき、傾斜軸周りの偏荷重は次式のとおり計算できます。
偏荷重=W×L
仮にW=20,000 N、L=0.3 mの場合、偏荷重は6,000 N・mとなります。
当社では、ポジショナ、移動装置をはじめとした周辺装置のメニューを幅広く揃え、ワークに応じた最適なシステムを構築することで、お客様の生産性の向上、溶接品質の向上に貢献します。
今回紹介した最大偏荷重をはじめとした周辺装置のスペックを正しく理解し、当社溶接ロボットシステムを有効にご活用ください。